

Project information
- Category: Other
- Client: Granite City Gearheads FIRST Robotics Team
- Project date: Jan 2013 - April 2013
Project Objective
To design and build a module to shoot frisbees accurately and consistently into the goals
Overview
The 2013 FIRST Robotics competition “Ultimate Ascent” required teams to build robots to score points by shooting frisbees into 3 different goals and climbing a pyramid. Frisbees could be put into play by “feeder stations” in the corner of the field with slots to drop the frisbees through. Initially my team decided to pursue a pyramid climbing robot. We struggled to get a working prototype and we shifted to a frisbee shooter instead so that we could finish within the 6 week time frame.

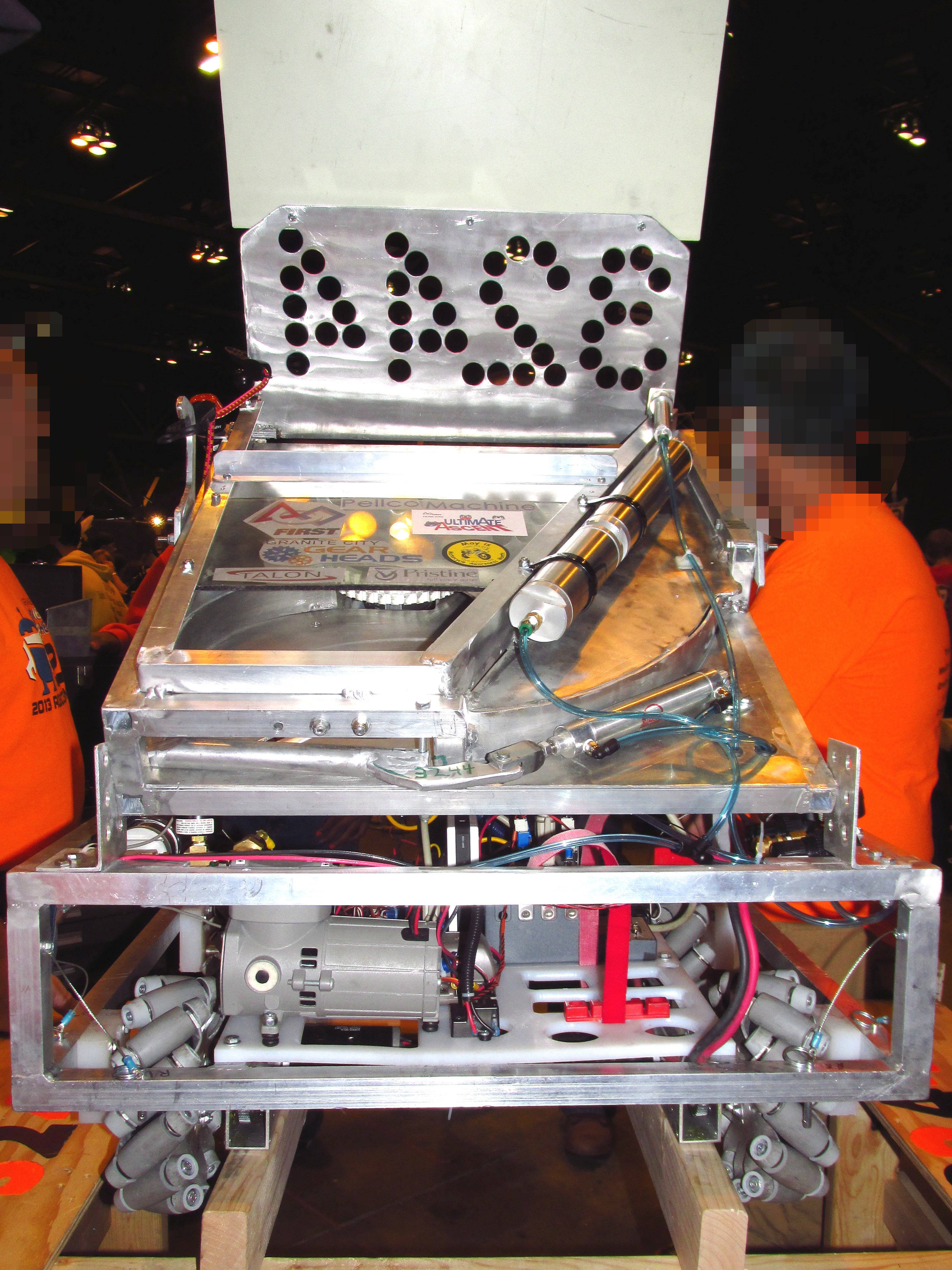
Final Product
The final shooter is gravity fed and could hold 4 frisbees (the game limit) at any given time. The next frisbee to be shot is pushed forward into a spinning wheel by a pneumatic piston. The spinning wheel propels the frisbee forward while simultaneously imparting spin by the friction of the frisbee against the wall of the shooter. The robot could unload 4 frisbees in about 5 seconds. It then returns to the feeder station to reload. To assist in this, a plate was added to the front of the shooter to fill the gap between the edge of the shooter and the feeder station caused by the robot bumpers.
Conclusion
For its ability to shoot accurately and consistently, the project completed its goal. Missed shots were almost always a result of driver error, rather than machine. Its main flaw is the cycle speed. A “fast” robot could unload 4 frisbees in 2-3 seconds, while ours took around 5. The loading mechanism is what slowed the process while it waits both for gravity to feed the frisbee and the feeder piston to reset. Our accurate robot was paired with 2 speed robots, and this alliance won the competition that year and earned an invitation to Championships
